
On this page provides all the datasets that were used in this project.
Before giving details regarding the datasets used in this project, it is important to give further details regarding the data format. Three different data formats were used in this work:
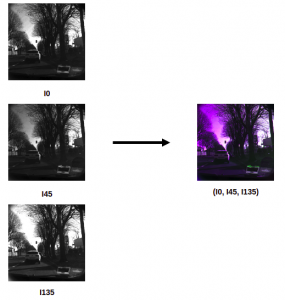
– The intensities images (I0, I45, I135) or (I0, I45, I90) depending on the dataset. In those images, the three chosen intensities of the same scene are placed as the RGB configuration ;
– The Stokes images (S0, S1, S2). In those images, the three Stokes parameters of the same scene are placed as the RGB configuration ;
– The parameters images (S0, AOP, DOP). In those images, the first Stokes parameter (S0) the angle of polarization (AOP), the degree of polarization are placed as the RGB configuration ;
– The Poincaré images (S0, DOP*cos(2AOP), DOP*sin(2AOP)). In those images, (S0, DOP*cos(2AOP), DOP*sin(2AOP)) are placed as the RGB configuration ;
– The Pauli inspired images (S1, I45, S0). In those images, the second Stokes parameter, the intensity corresponding to the polarizer oriented at 45 degrees and the first Stokes parameter are placed as the RGB configuration ;
– The HSV images (AOP, DOP, S0). In those images, the angle of polarization, the degree of polarization and the first Stokes parameter are placed as the RGB configuration.
An illustration of the same scene under the different polarimetric modalities can be found bellow. Note that in each dataset, images in the different subfolders that have the same name represent the same scene.


The PolarLITIS dataset:
This set contains all the polarimetric and RGB images that are currently labelled. It contains 2569 paired polarimetric images and RGB images in good and adverse weather conditions. The objects are divided into 4 classes (car, person, bike, motorbike) which are the most common objects in road scenes.
There are 5 polarimetric data formats constituted of 3 channels each which are represented in the following figure. For example, for the HSV images, (AOP, DOP, S0) are placed as the RGB configuration. The dataset properties are summarized up in the following table. Here the properties are available for each modality, we can find the number of images and the number of instances of each class.
The dataset properties are summarized up in the following table. Here the properties are available for each modality, we can find the number of images and the number of instances of each class.
| Class | Train | Val | Test |
| Images | 1640 | 420 | 509 |
| car | 6061 | 2102 | 9265 |
| person | 527 | 134 | 442 |
| bike | 39 | 7 | 7 |
| motorbike | 14 | 5 | 0 |
Download: PolarLITIS
A polarization-based road scenes database with adverse weather conditions:
This set contains all the polarimetric and RGB images that are currently labelled. It contains 7244 polarimetric images and 2994 RGB images in good and adverse weather conditions. Those images are sorted by their aquisition date. The objects are divided into 4 classes (car, person, bike, motorbike) which are the most common objects in road scenes.
The polarimetric data formats are (I0, I45, I90) which represents the intensities from each angle of the polarizer, (S0, S1, S2) which represents the Stokes vector and (S0, AOP, DOP) where AOP and DOP stand respectively for Angle and Degree Of Polarization.
Download: POLARIMETRIC_DB_7244_RGB_DB_2994
An implementation of RetinaNet: github (inspired of fizyr’s work)
Weights of RetinaNet-50 trained on MS COCO and fine tuned on this polarimetric dataset: weights (where I refers to (I0, I45, I135), Stokes refers to (S0, S1, S2) and Params refers to (S0, AOP, DOP))
A polarization-based road scenes database:
This database contains 1236 polarimetric images divided into a 1004 training set and a 231 test set. The objects are divided into 4 classes (car, person, bike, motorbike) which are the most common objects in road scenes.
The polarimetric data format is (I0, I45, I90) which represents the intensities from each angle of the polarizer.
Download: POLARIMETRIC_DB_1236